Comments
- No comments found

Artificial intelligence (AI) has been transforming the world in various ways, and the field of motion planning is no exception.
With the increasing adoption of autonomous vehicles and robotics in various industries, AI-based motion planning has become an essential tool for achieving efficient and safe movements. In this article, we will explore how AI is revolutionizing the field of motion planning and the challenges it faces.
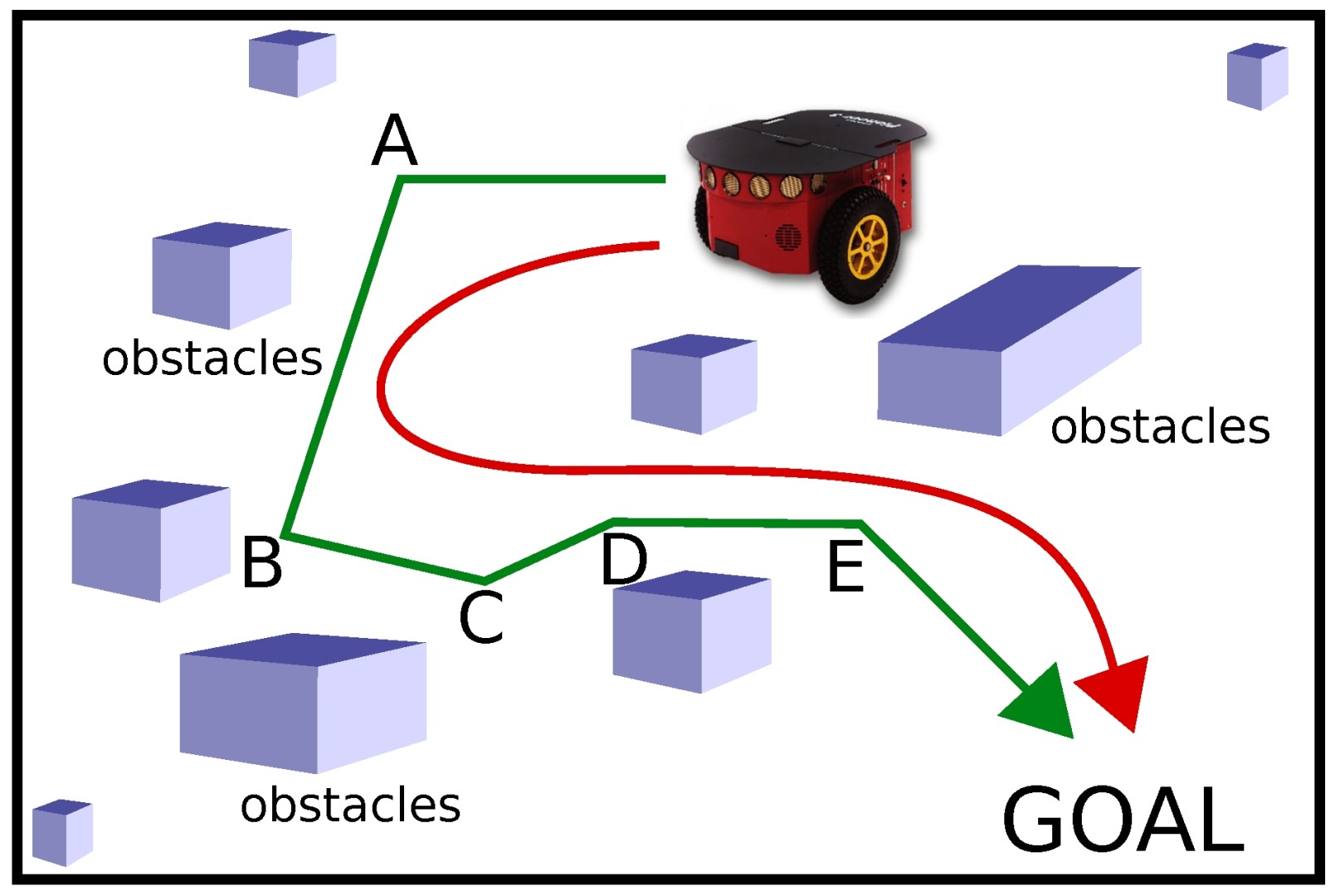
Motion planning refers to the process of generating a sequence of actions that enable a robot or vehicle to move from its initial state to a desired goal state, while avoiding obstacles and adhering to various constraints. It is a crucial component of robotics and autonomous systems that require the ability to navigate through complex environments.
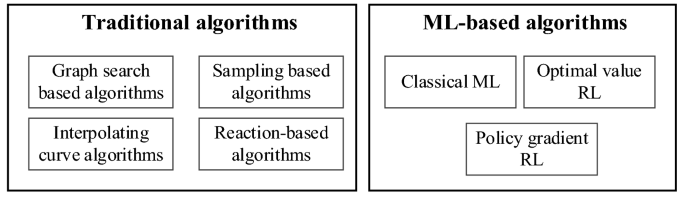
Traditionally, motion planning algorithms relied on pre-defined rules and heuristics that specified how a robot should move based on its current state and the environment around it. However, these approaches often struggle with complex environments with changing conditions, and they can be challenging to scale.
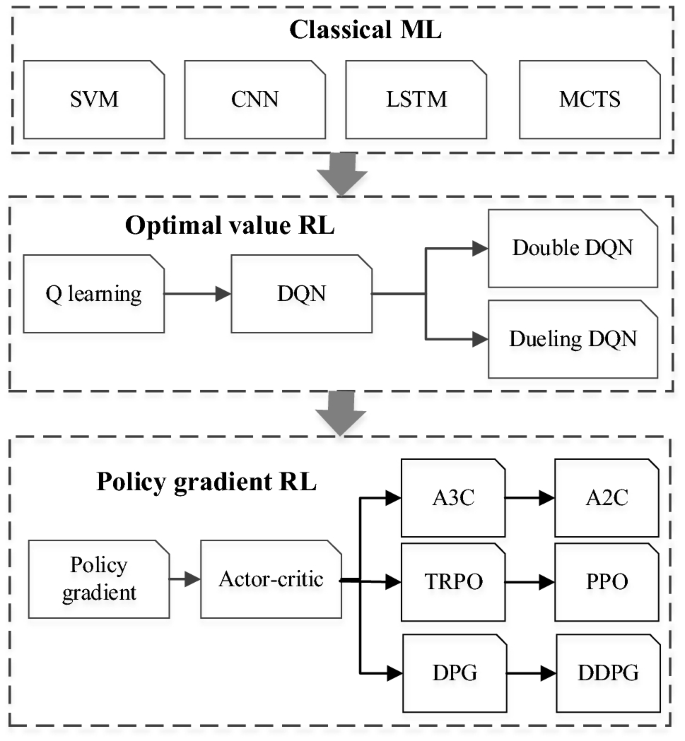
AI-based motion planning, on the other hand, leverages machine learning algorithms to learn from data and generate optimal paths in real-time. This approach allows robots to adapt to changing environments, avoid obstacles, and optimize movements based on various factors such as energy efficiency and safety.
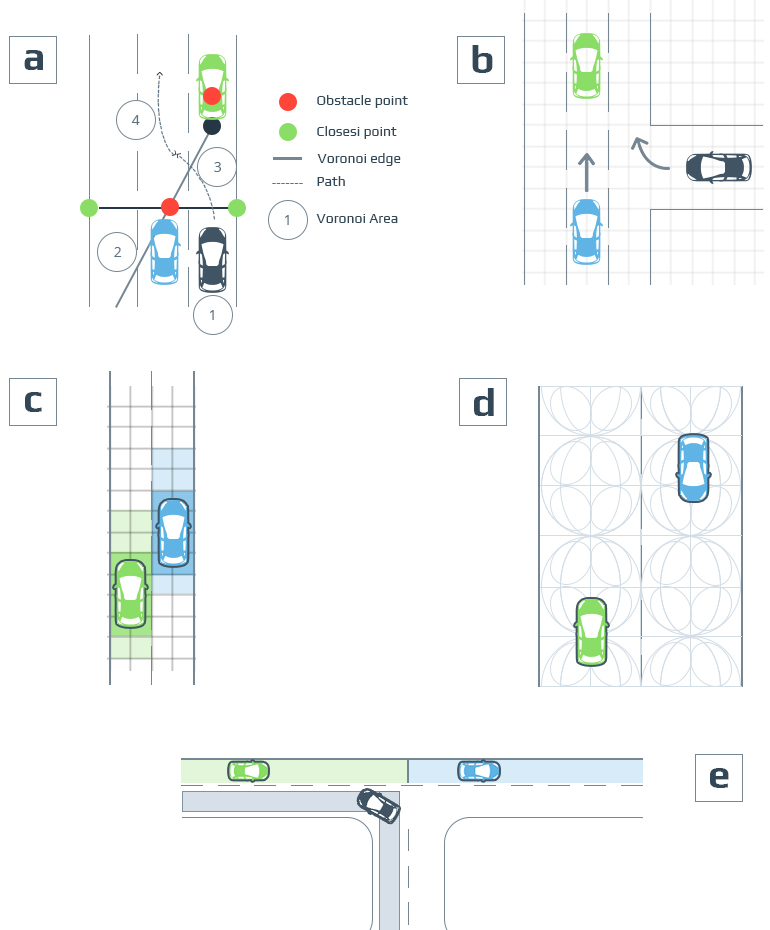
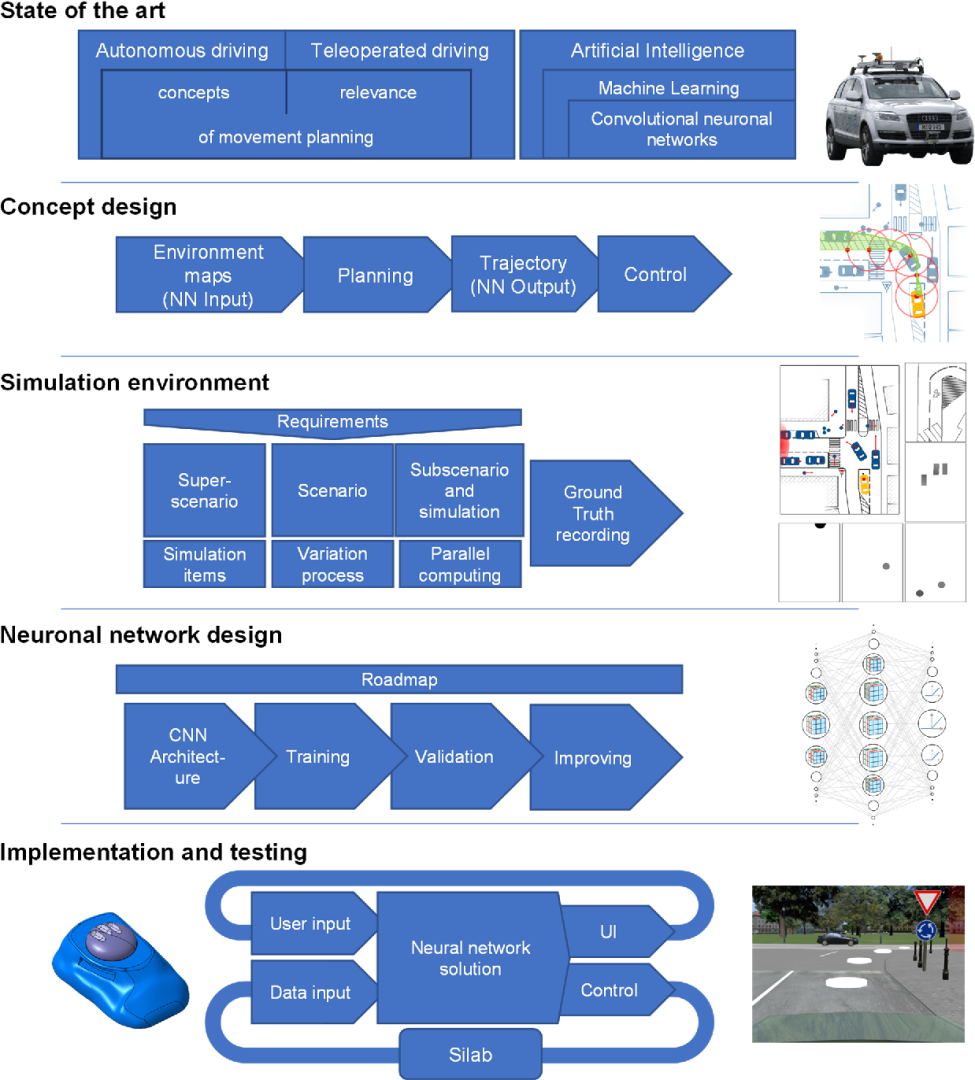
One of the most promising applications of AI-based motion planning is in autonomous vehicles. Self-driving cars need to navigate through various environments, including crowded streets and highways, and make real-time decisions to avoid accidents and optimize their routes.
AI-based motion planning enables self-driving cars to analyze various factors, including traffic, road conditions, and weather, and generate optimal routes that maximize safety and efficiency. Moreover, AI can enable self-driving cars to learn from their experiences and continuously improve their decision-making abilities.
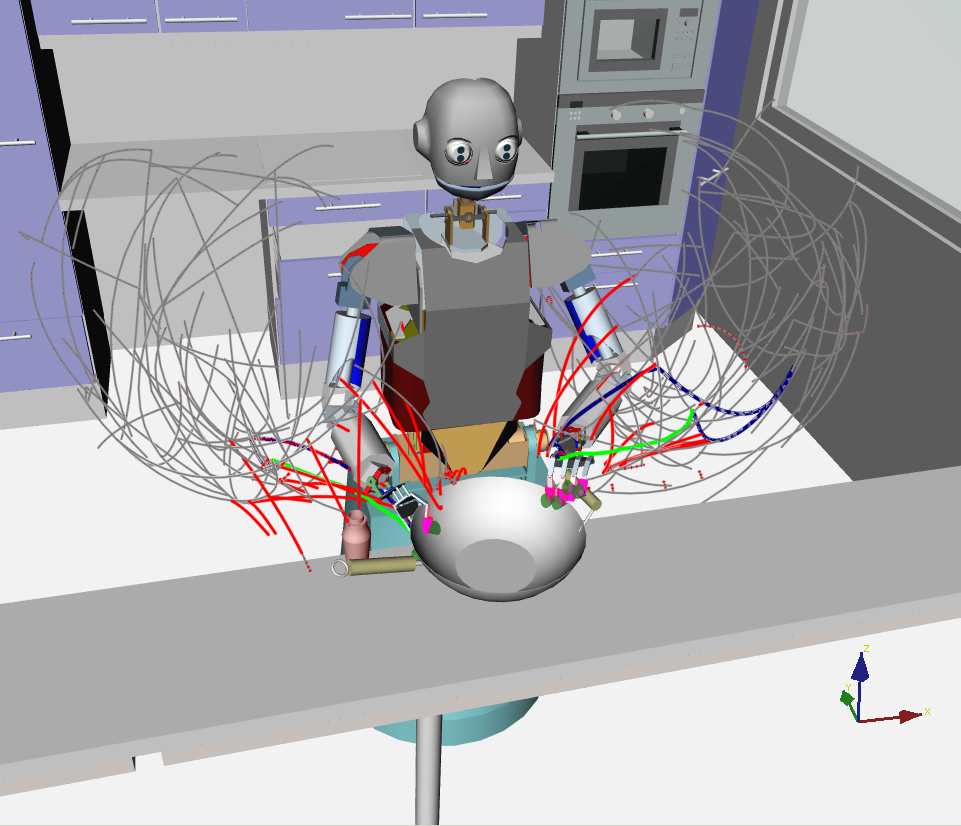
Apart from autonomous vehicles, AI-based motion planning has numerous applications in robotics. From manufacturing to healthcare, robots are being increasingly used to perform tasks that are repetitive, dangerous, or beyond human capability. AI-based motion planning allows robots to navigate through complex environments and perform tasks efficiently and safely.
For example, in manufacturing, robots can use AI-based motion planning to optimize their movements, reduce energy consumption, and increase productivity. In healthcare, robots can use AI-based motion planning to navigate through hospitals and perform tasks such as delivering medications and assisting patients.
While AI-based motion planning has the potential to transform various industries, it still faces several challenges and limitations.
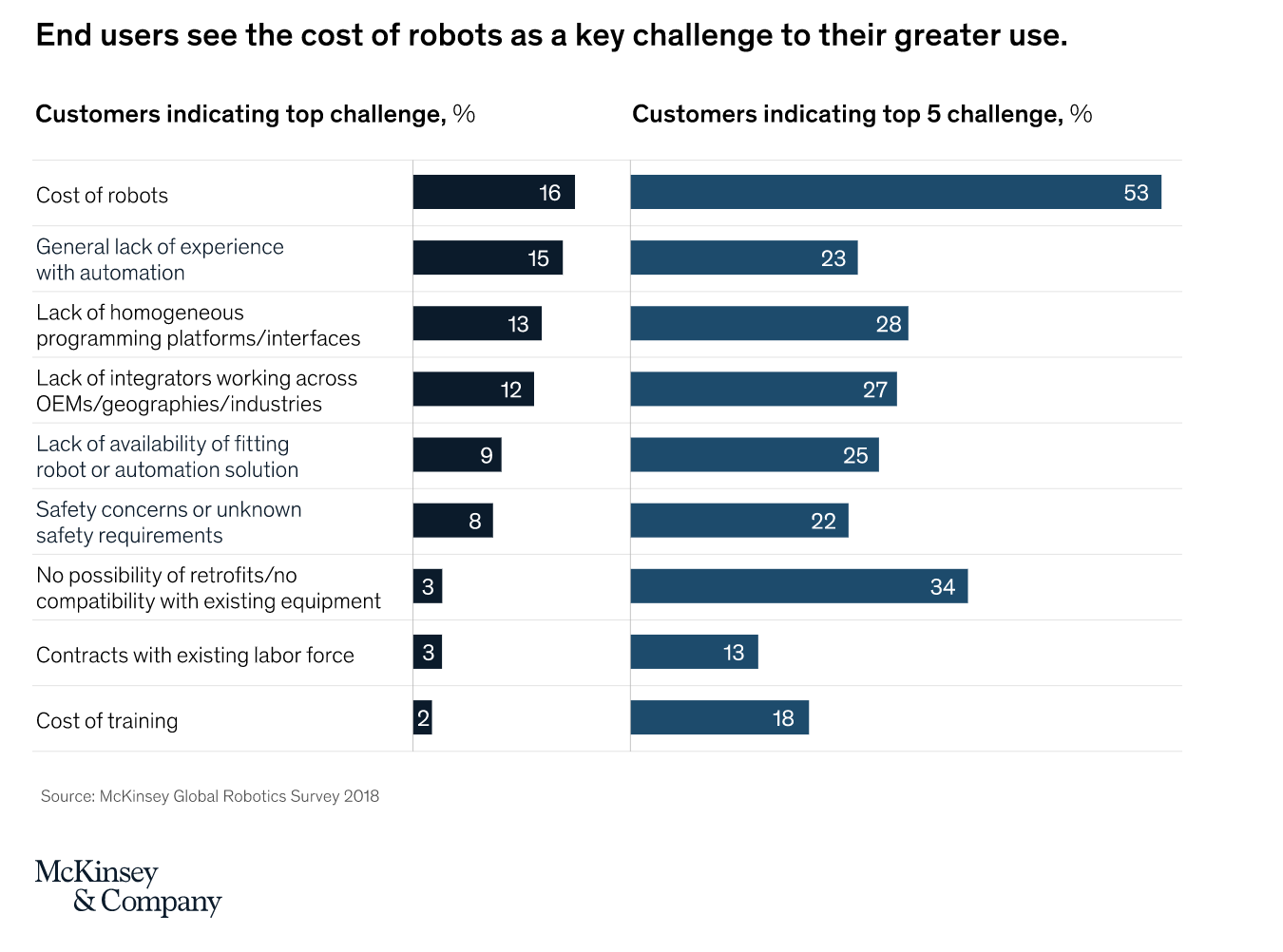
One of the major challenges is ensuring the safety of AI-powered systems, especially in critical applications such as autonomous vehicles and healthcare.
Another challenge is the need for large amounts of high-quality data to train AI algorithms. In some cases, collecting such data can be difficult or expensive, limiting the applicability of AI-based motion planning.
Moreover, the use of AI-based motion planning in complex environments can lead to unpredictable and sometimes undesirable behaviors. For example, in autonomous vehicles, AI-based motion planning may sometimes generate routes that are suboptimal or unsafe, leading to accidents.
Despite the challenges, the future prospects of AI-based motion planning are promising.
With advances in machine learning algorithms and hardware, AI-powered systems are becoming more efficient and capable of handling complex environments.
Moreover, ongoing research is focused on developing more robust and reliable AI-based motion planning algorithms that can adapt to changing conditions and ensure the safety of the systems.
AI-based motion planning is transforming the field of robotics and autonomous systems, enabling them to navigate through complex environments and perform tasks efficiently and safely. While there are still several challenges and limitations to be addressed, ongoing research and development in this field are promising, and we can expect to see more AI-powered systems in various industries in the future.
The future of robotics looks promising, with AI-based motion planning being one of the key areas of development. As AI-powered systems become more efficient and capable of handling complex environments, we can expect to see more robots and autonomous vehicles in various industries, including manufacturing, healthcare, and transportation. Moreover, the ongoing research and development in AI-based motion planning are focused on addressing the challenges and limitations, such as ensuring safety and reducing the need for large amounts of high-quality data. With the continued progress in robotics and AI, the possibilities for automation and innovation are endless.
BBN Times connects decision makers to you. Experts in their fields, worth listening to, are the ones who write our articles. We believe these are the real commentators of the future. We quickly and accurately deliver serious information around the world. BBN Times provides its readers human expertise to find trusted answers by providing a platform and a voice to anyone willing to know more about the latest trends. Stay tuned, the revolution has begun.
Leave your comments
Post comment as a guest